Nuri Kim
Assistant Professor
Department of Electronics Engineering, Jeonbuk National University
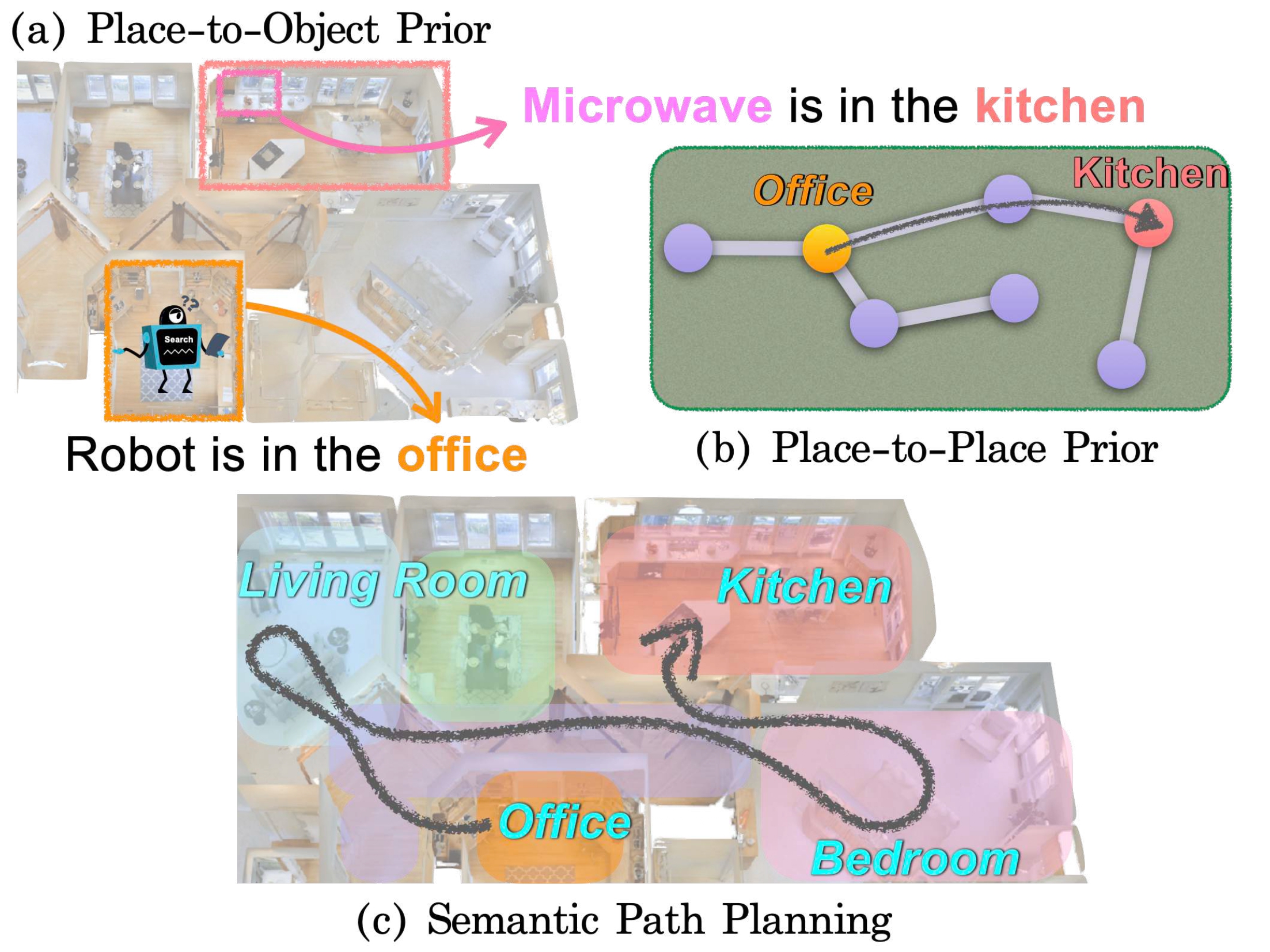
At Neural Robot Intelligence Laboratory (NuRI Lab), we explore how robots can develop world models to make informed decisions, utilize visual navigation for goal-directed movement, and leverage 3D Gaussian Splatting for enhanced spatial perception. Our research integrates techniques from task and motion planning, semantic mapping, skill chaining, and multi-modal perception to build robots that can operate robustly in real-world environments and collaborate effectively with humans.